YIN KAIJIE(殷 凯捷)I am a Master student at the Faculty of Science and Technology at University of Macau, where I work on Efficient AI for Computer Vision and Robot Perception, supervised by Professor KONG Hui. From May 2025 to October 2025, I study at Singapore Management University as a visiting student, supervised by Professor ZHANG Zhiyuan. |
|
ResearchMy research interests focus on efficient machine learning for computer vision and robotic perception. I aim to develop efficient models that enable hardware systems to perform real-time perception, interaction, and decision-making in real-world physical environments. |
|
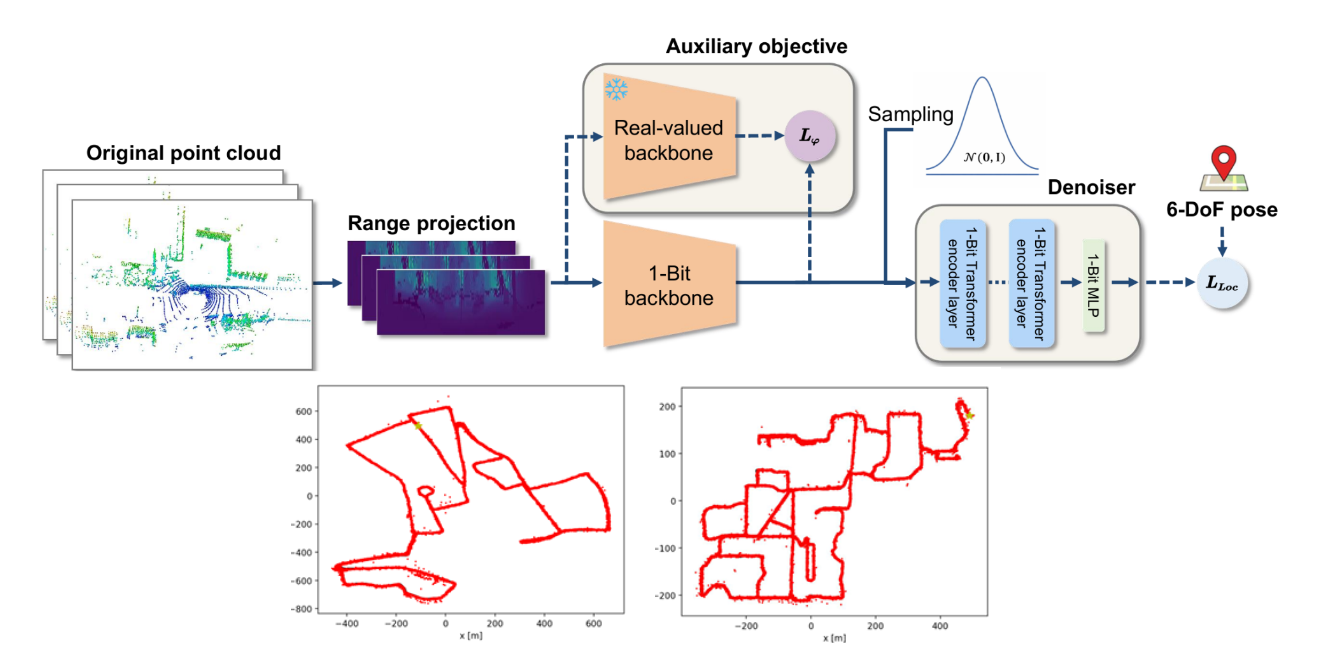
Learning 1-Bit LiDAR-based Localization with Auxiliary ObjectiveKaijie Yin, Zhiyuan Zhang, Tian Gao, Wentao Zhu, Chengzhong Xu, Hui Kong European Conference on Computer Vision (ECCV), 2026 |
|
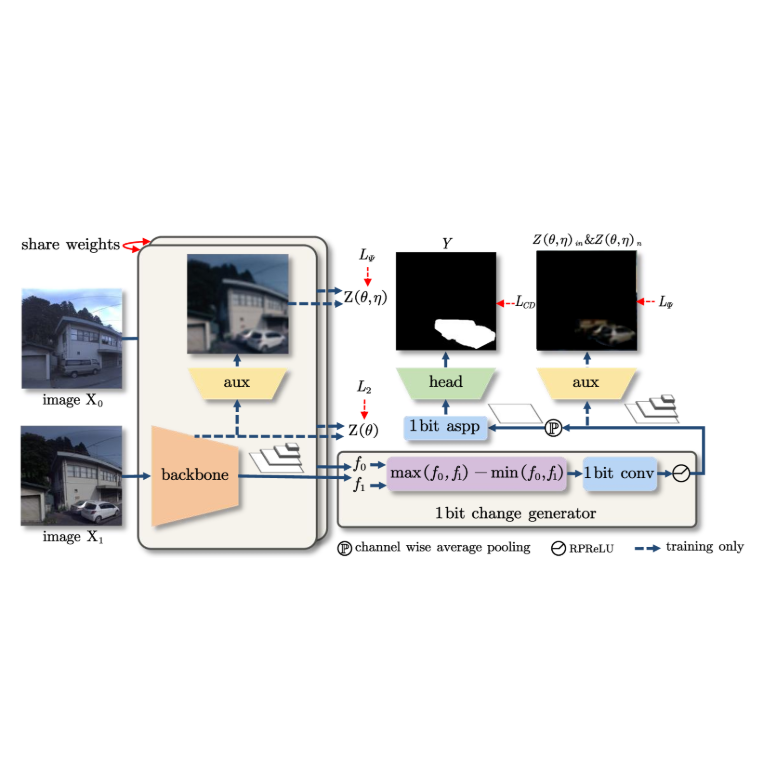
Information-Bottleneck Driven Binary Neural Network for Change DetectionKaijie Yin, Zhiyuan Zhang, Shu Kong, Tian Gao, Chengzhong Xu, Hui Kong IEEE/CVF International Conference on Computer Vision (ICCV), 2025 arxiv / code / |

|
BHViT: Binarized Hybrid Vision TransformerTian Gao, Zhiyuan Zhang, Yu Zhang, Huajun Liu, Kaijie Yin, Chengzhong Xu, Hui Kong IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2025 arxiv / code / |
|
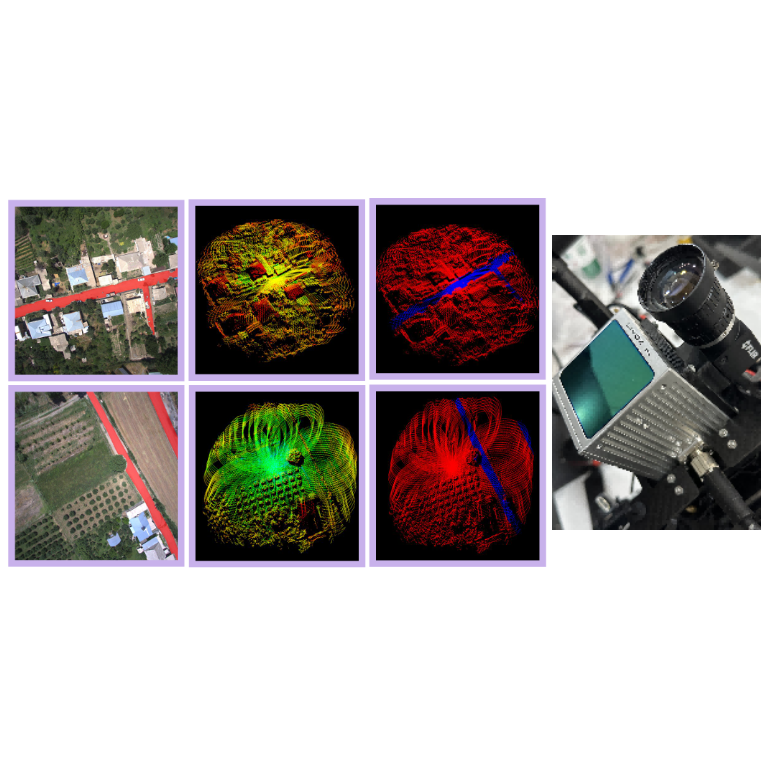
Pathfinder for Low-altitude Aircraft with Binary Neural NetworkKaijie Yin*, Tian Gao*, Hui Kong IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025 arxiv / video / code / |
Honors and Awards
|
Affiliations and Experiences
|



ServicesReviewer
|